


AMSY-6聲發(fā)射系統軟件
軟件特點:
地道(dào)的德國(guó)風格:各種(zhǒng)設置按部就班,确保檢測數據真實、可靠
相關圖的靈活性:随時修改分析參數和相關圖,不影響數據采集
原數據的分段性:随時添加标簽到數據中,方便分段分析
數據的快速查找:定位源、波形及數據列表等相關數據一一對(duì)應
探頭布置可靠性:準确計算陣列中任何探頭的間距,避免盲區
耦合結果可比性:軟件可自動生成(chéng)脈沖列表,耦合情況一目了然
原始數據擴展性:采用SQLite格式,用戶可自由訪問數據
采集和分析軟件相互獨立,可以獨立運行。每套軟件沒(méi)有通道(dào)數限制,使用時無需密碼狗,開(kāi)機即可使用。
采用 SQLite格式:實現了開(kāi)放源代碼,用戶可自由訪問數據。 使用人員可使用第三方軟件進(jìn)行二次開(kāi)發(fā)讀取聲發(fā)射數據(可使用MATLAB、 LabVIEW等開(kāi)發(fā)工具,浏覽聲發(fā)射數據),這(zhè)個功能(néng)極大的方便科研院所二次開(kāi)發(fā),通過(guò)自己開(kāi)發(fā)的軟件,分析聲發(fā)射數據。
軟件具有區域、線、平面(miàn)、柱面(miàn)、3D球面(miàn)、儲罐底闆及3D定位軟件、累積分析、波形分析、FFT變換、信号模式自動識别、小波分析、标定結果比較和儀器性能(néng)自動校驗等軟件。
1、BDSWB基本采集分析軟件包,包括SWBN、VAE1、VAE2、VAEFP、VAEUP、DTACV。
1.1、SWBN:AE數據和波形數據分析基本軟件,包括軟件控制面(miàn)闆,在線幫助文件,鑰匙報告,報警管理等。
1.2、VAE1:擴充模式1,擴充分析軟件VisualAE 功能(néng)如下:
- 啓動第二個垂直軸(右軸),以分布、曆史或點陣顯示外接參數與AE圖對(duì)應關系;
- 支持多位面(miàn):每個軸的位面(miàn)數量不受限制,獨立的位面(miàn)設置(樣(yàng)式、色彩、符号、濾波、圖例),每個位圖可使用多個濾波;
- 位圖可輸出到剪切闆,分辨率可選擇;
- 每個圖有标題和多行注解,通過(guò)激活列出;
- 窗口的ID碼指示視圖在樹結果中的位置;
- 通過(guò)模式識别、波形應用或用戶自己的程序,提取波形的特征,還(hái)可以將(jiāng)其組合到其它結果中或作爲濾波判椐;
- 可顯示硬盤的有效空間曆史,及當前的有效硬盤空間。
1.3、VAE2:擴充模式2,需要VAE1軟件,擴充分析軟件VisualAE 功能(néng)如下:
- 圖形:圖片覆蓋(位圖或向(xiàng)量圖可以放在另外圖的後(hòu)面(miàn)),黑白背景可選擇;
- 圖形、列表的位置可調整(視圖優化);
- 輸出列表:文本格式輸出到文件和剪切闆上;
- 頁:可插入多頁視圖,選擇布局;輸入頁名、标題和多行注解;
- 以BMP和JPG格式輸出頁;
- 用波形觀察器(TR-Viewer)觀察波形,用鼠标在AE數據點上點擊可獲得該AE數據對(duì)應的波形。
1.4、VAEFP:分析軟件中基于邏輯上的過(guò)濾器。
1.5、VAEUP:用戶處理器,可以在采集數據中執行用戶自定義的程序。
1.6、DTACV:把dta格式的數據轉換成(chéng)pri文件。
AMSY-6 型全數字聲發(fā)射定位系統對(duì)聲發(fā)射源的定位功能(néng)極其完善,除了具有區域定位、一維定位、二維定位、三維定位等基本的定位功能(néng)外,還(hái)有多組定位模式、專用的球面(miàn)定位和專用的儲罐底闆定位模式。通過(guò)軟件模拟處理,可以球形容器整體3D圖形顯示,3D圖可任意旋轉、放大、縮小,實現了從各個角度觀察源的位置。
2、BDSWLoc1定位軟件包
包括線性定位模塊VAELL,平面(miàn)或柱面(miàn)定位模塊VAELP,多組定位方式模塊VAELMG,累加器程序VAECP,幅度修正模塊VAELAC。
2.1、線性定位模塊VAELL:可以有直線和環線的線定位。
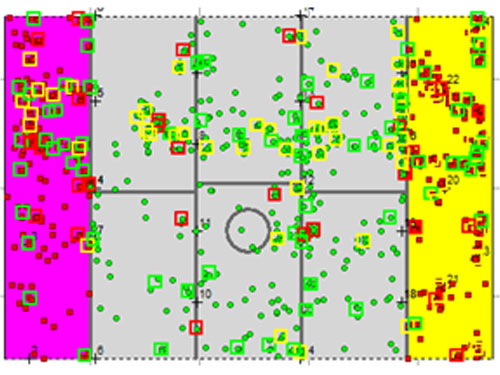
2.2、平面(miàn)或圓柱形定位模塊(VAELP):通過(guò)X、Y坐标軸進(jìn)行定義傳感器位置和定位結果。沒(méi)有必要把傳感器按事(shì)先設計規則圖形布置,傳感器可以根據現場結構情況需要布置。
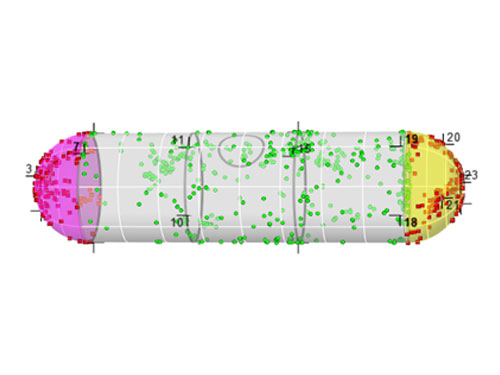
柱面(miàn)3D定位圖
圓柱式壓力容器定位軟件
獨特的定位不準确度分析軟件使得定位更加準确。
2.3、爲了使定位更加準确,除了具有不準确度分析軟件之外,還(hái)可以對(duì)到達時間進(jìn)行修正。一般我們選取過(guò)門檻的時刻爲到達時間,但有些特殊情況,如下圖所示,就需要結合實際的波形對(duì)到達時間進(jìn)行修正,以實現更加準确的定位。
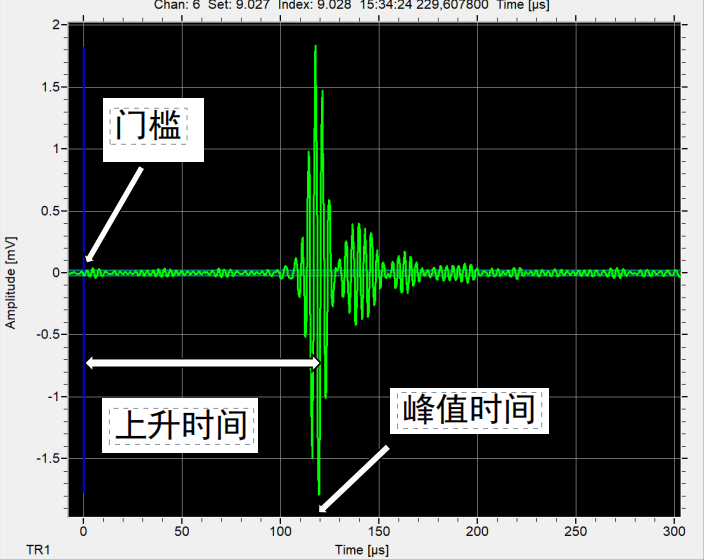

到達時間修正功能(néng)
2.4、定位模塊的多組擴充(VAELMG):一個定位處理程序可以運行多個定位通道(dào)組;每個通道(dào)組有單獨坐标體系和定位算法。
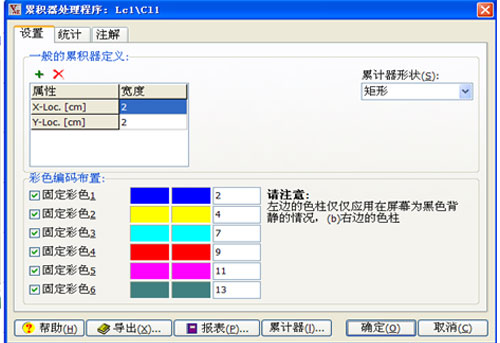
2.5、累加器程序VAECP:用戶可以指定區域大小和産生的定位源個數,方便識别和統計。
2.6、VAELAC 幅度修正模塊:計算聲發(fā)射源和第一撞擊探頭之間的幅度測量和距離,執行幅度修正;
3、專用的球罐三維球形定位軟件(VAELS)
用經(jīng)緯度定義任意的傳感器位置和定位結果,結果也用X-Y-Z坐标的形式表示;球形體定位結果可以以三維圖形的形式顯示在屏幕中,并能(néng)顯示出經(jīng)緯度。球狀的三維圖形可以旋轉、縮放進(jìn)行觀察。定位圖中高密集度的區域能(néng)标示出聚類組。


球面(miàn)定位軟件
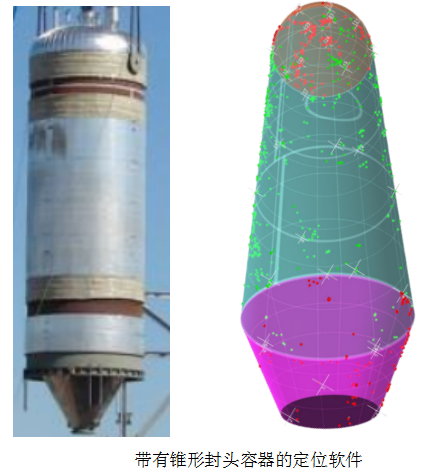
4、專用的錐面(miàn)定位軟件
很多塔器或容器都(dōu)帶有錐形封頭,對(duì)于這(zhè)種(zhǒng)結構的檢測需要專用的錐面(miàn)定位軟件才能(néng)實現更加準确的定位。
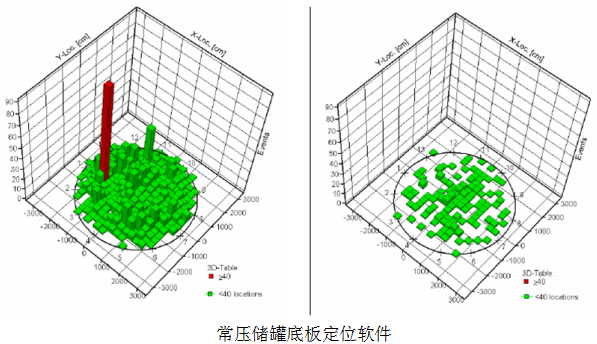
5、專用儲罐底闆定位軟件(VAELTB)
該定位軟件主要用于檢測儲罐底闆的腐蝕及洩漏檢測。

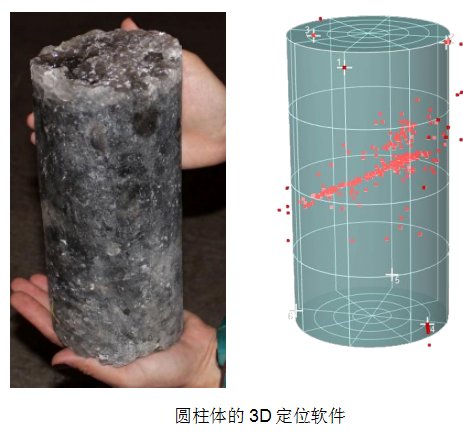
6、實心3D定位軟件
專用的實心3D定位軟件,傳感器可随意布置,可以用于立方體的定位,也可以用于圓柱體的定位。
7、實時波形分析軟件
高效的分析和處理采集的波形數據
- TR-Copy:根據聲發(fā)射軟件VisualAE或其它用戶程序産生的列表,拷貝一個引入文件中的波形到一個輸出文件。可以用來建立培訓模式識别軟件的學(xué)習數據數據。
- TR-Combi :爲培訓模式識别軟件建立有效的數據基礎。
- Feature Extractor:從波形中提取特征參數,可應用在VisualAE的數據列表,圖形和濾波中。
- 頻散曲線軟件:計算出不同材料和不同厚度速度與頻率的關系
- 小波分析軟件:對(duì)波形做更進(jìn)一步的分析
波形分析軟件
波形分析界面(miàn)
頻散曲線軟件
小波分析軟件
8、模式識别軟件
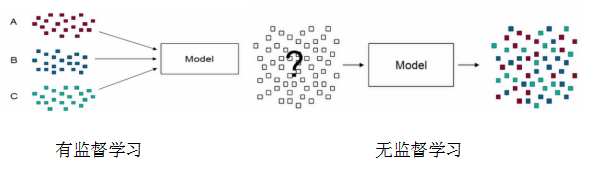
VisualClass模式識别和信号分類軟件
- 通過(guò)模式識别軟件,可識别不同的聲發(fā)射信号;
- 具有監督和無監督學(xué)習策略。
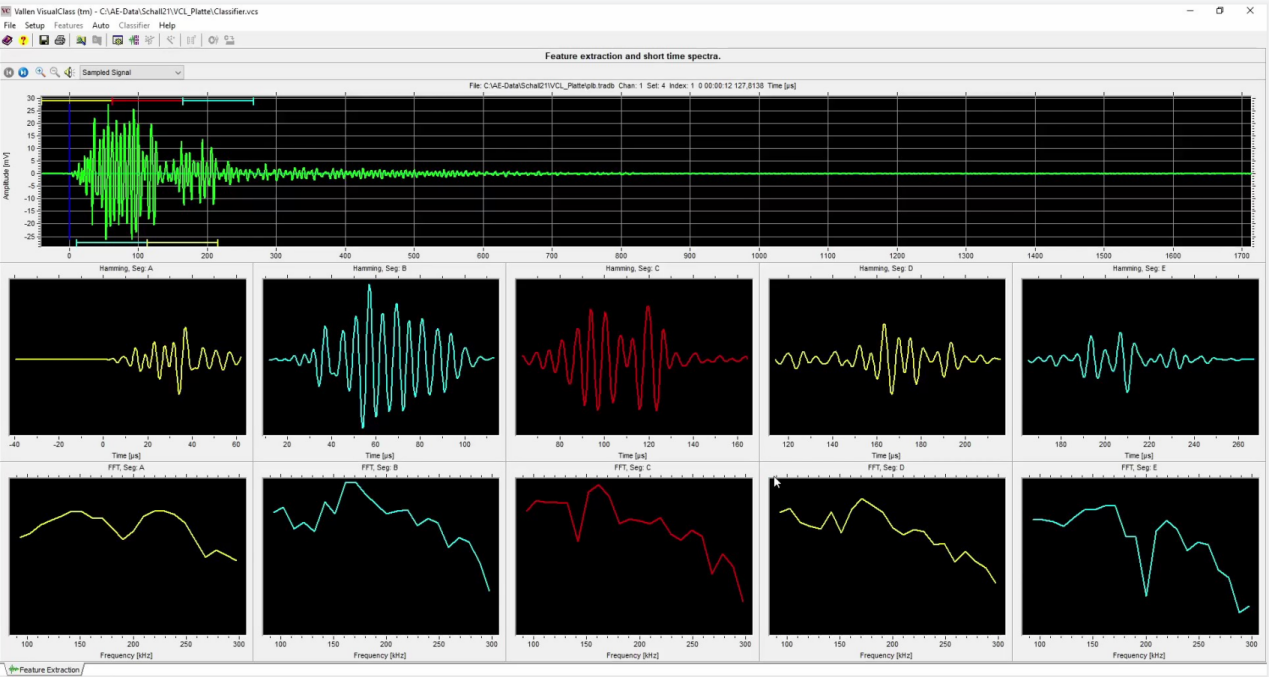
模式識别分析界面(miàn)1
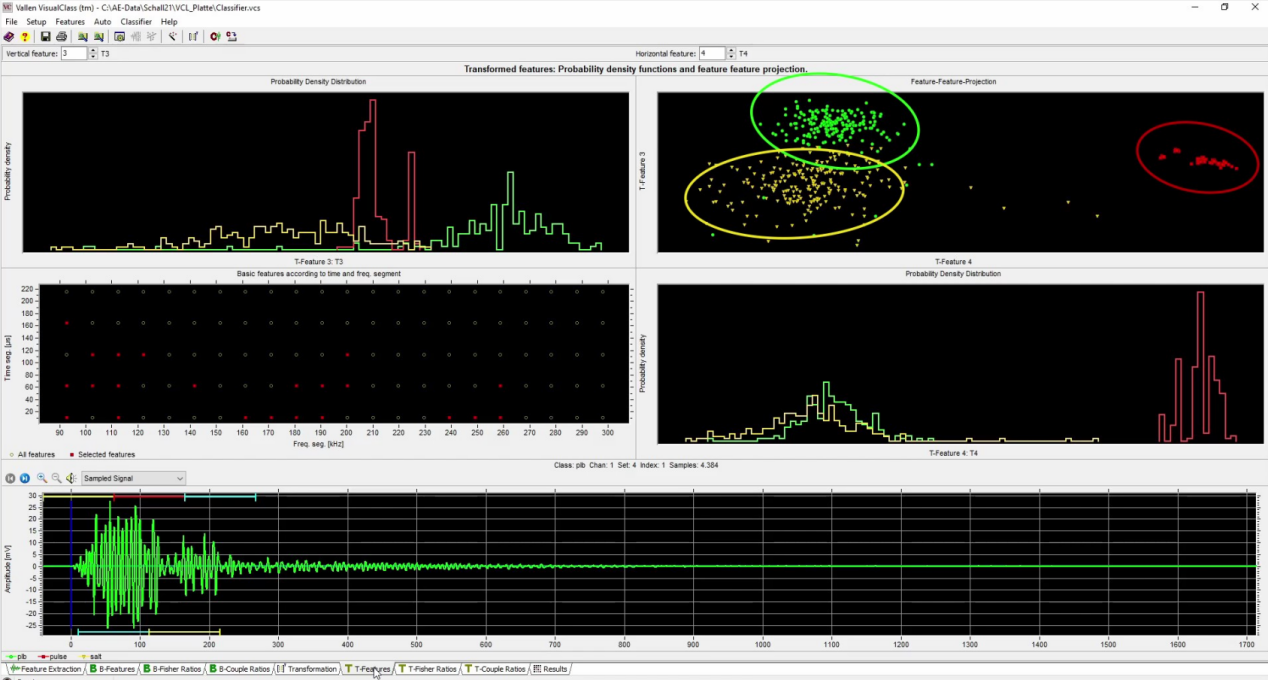
模式識别分析界面(miàn)2
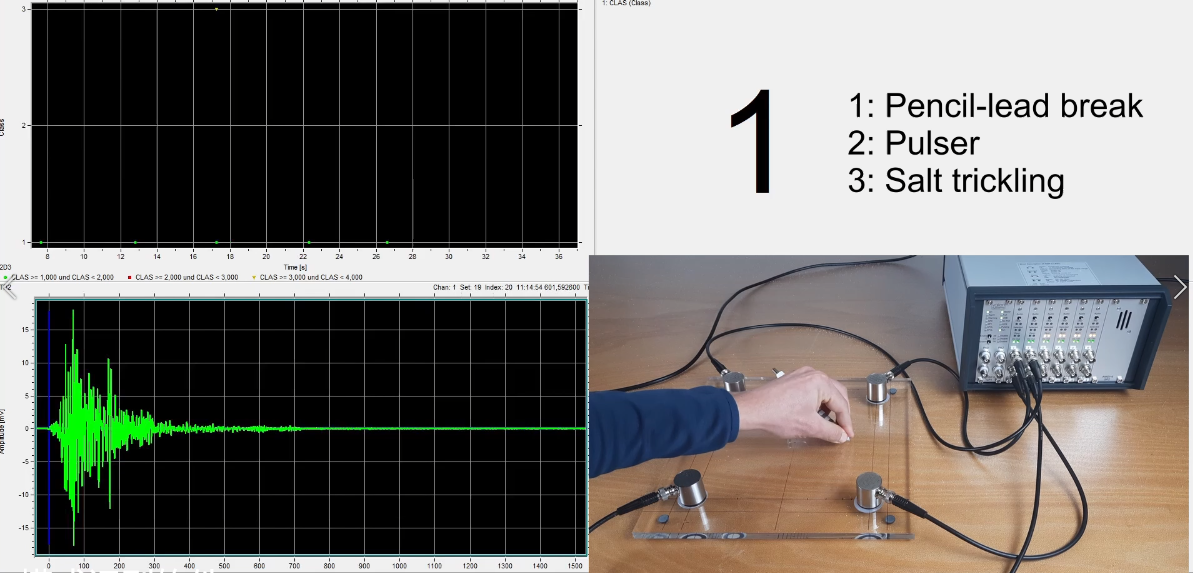
分析軟件自動識别斷鉛信号
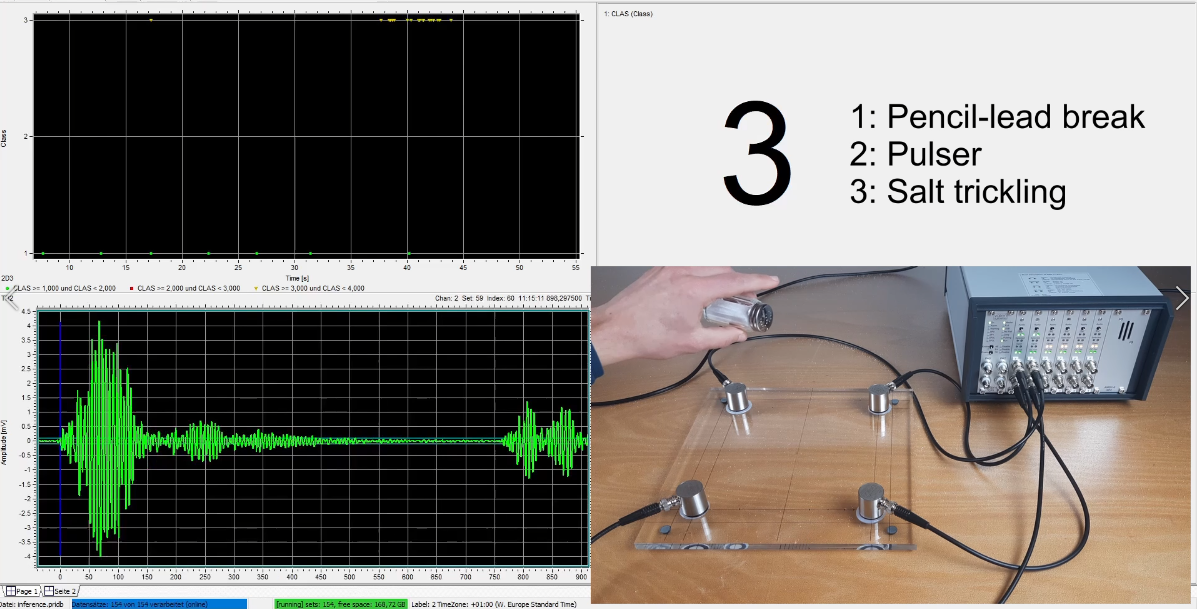
分析軟件自動識别撒鹽信号
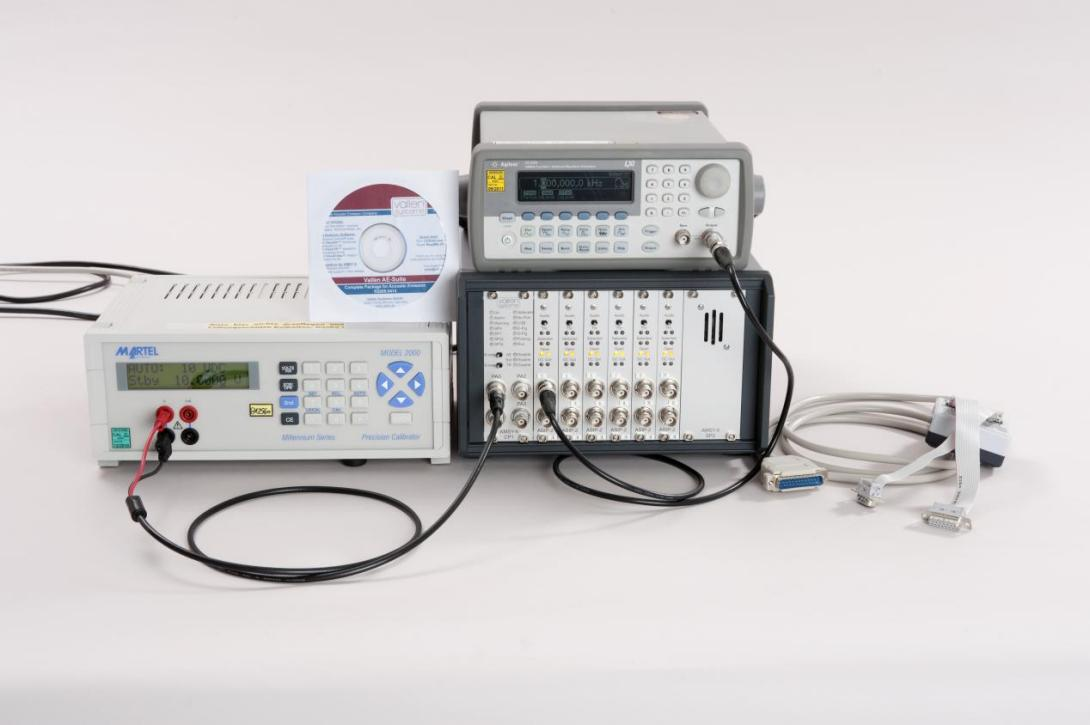
9、聲發(fā)射主機校準軟件
該軟件主要用于Vallen聲發(fā)射主機的定期校準,配置相關硬件用戶自己即可定期按照廠家的要求對(duì)聲發(fā)射主機進(jìn)行校準,并直接給出各通道(dào)和标準值的偏差百分比,通過(guò)該值即可判斷各通道(dào)是否在正常範圍内。
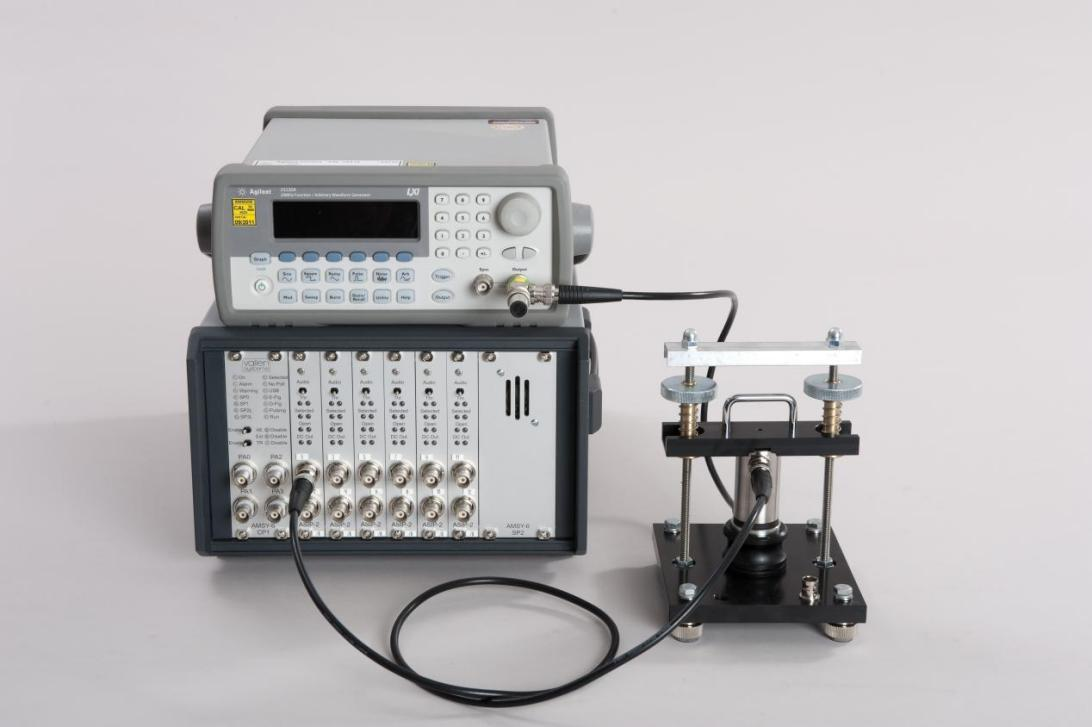
10、聲發(fā)射傳感器校準軟件
該軟件主要用于聲發(fā)射傳感器的校準,配置相關硬件用戶自己即可對(duì)各種(zhǒng)聲發(fā)射傳感器進(jìn)行定期校準,并直接給出傳感器響應曲線。
四、其他配件

聲發(fā)射相關配件

前置放大器和傳感器

五合一前置放大器

防爆傳感器
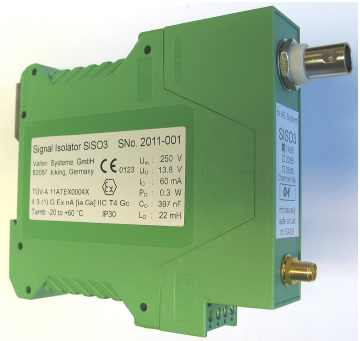
防爆隔離栅

耦合盒(主要解決采集卡無法提供28V直流供電的應用)
聯系我們
地址:北京市石景山區阜石路166号洋大廈1113室
郵編:100043
企業郵箱:cst@cstndt.com
銷售郵箱:sales-cst@cstndt.com
技術郵箱:tac-cst@cstndt.com

掃一掃,關注我們公衆号
 010-88909950
010-88909950 
 點擊咨詢
點擊咨詢